
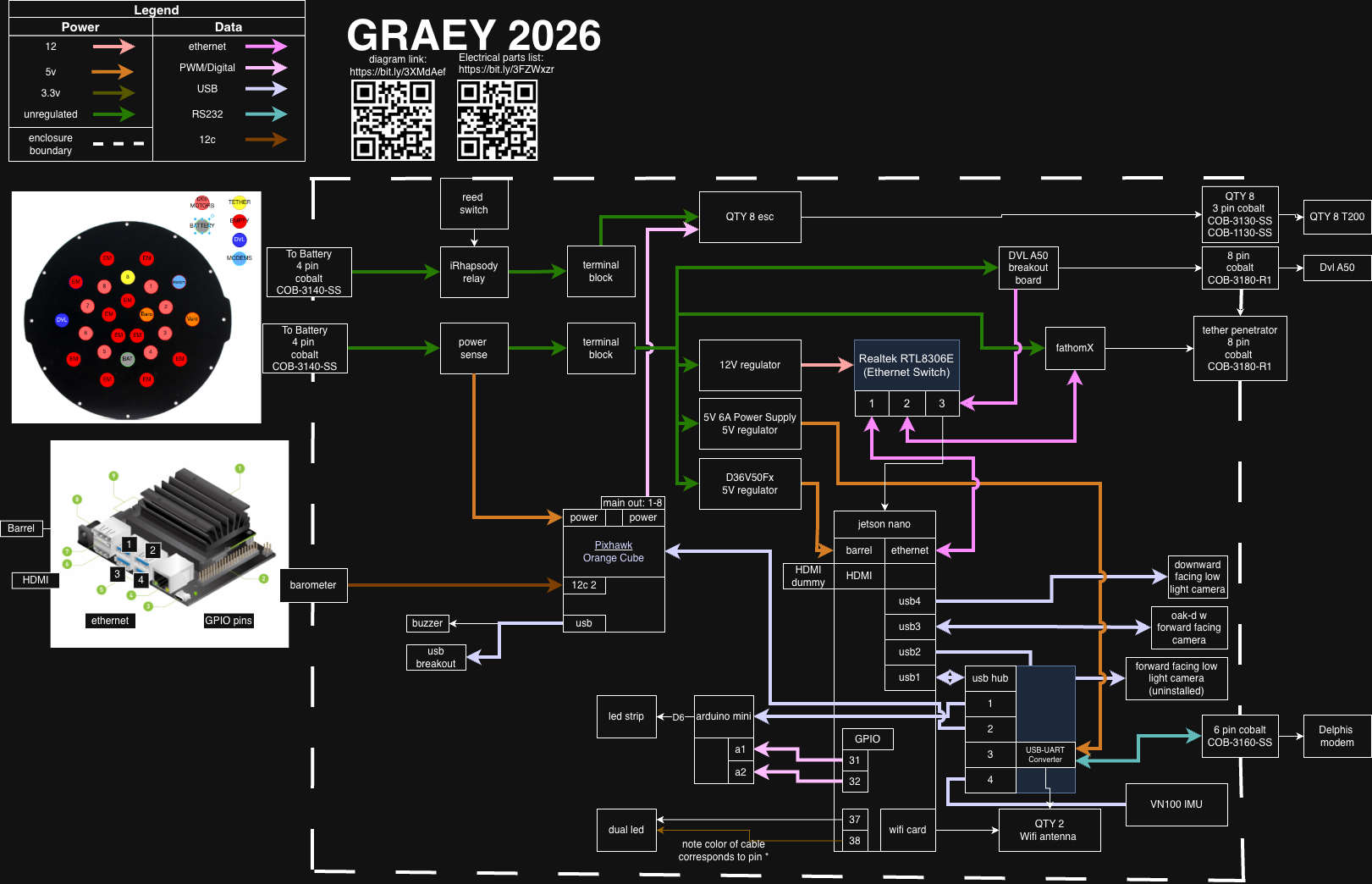
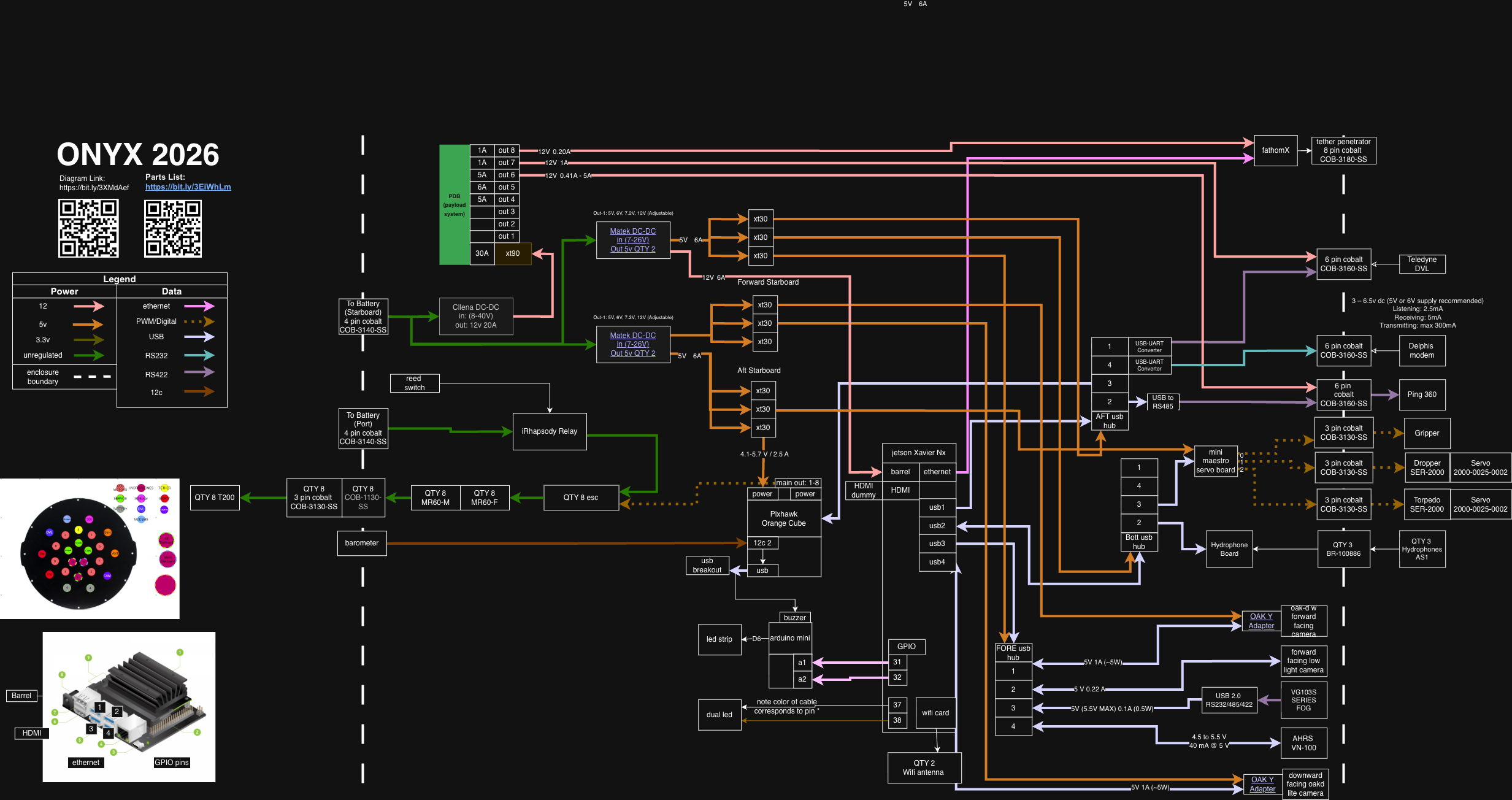
Electrical System
Both AUVs utilize Jetsons as onboard computers. Onyx uses a more powerful Jetson Xavier NX, while Græy uses a Jetson Nano. To enable autonomous movement, both subs use a Pixhawk 4 as flight controllers. Onyx, with its larger electronics enclosure, is expandable. On both AUVs, the external sensors communicate with systems in the main electronics enclosure via connectors which are sealed from the inside and the outside of the main end cap, rather than simple penetrators that can fail with weak epoxy.
Overview

The increased enclosure length allows all electronics to be housed with 3 layers instead of 4 to allow for ease of access within Onyx’s 8 inch diameter chamber. This will also increase heat dissipation within the enclosure. Further thermal management include various heatsinks and fans, which route hot air toward the aluminum end caps. The aluminum will conduct this heat into the water surrounding the enclosure.
System Diagrams
Standardized Kill Switch System
The team pivoted away from the previous kill switch system to enable longer endurance. The implemented design isolates our noisy ESC line from our sensitive payload and sensor line. We built off competition success inspired by the team’s 2024 RoboBoat kill switch system implementing IRhapsody relay with a ground trigger. Instead of an external red button, utilized in RoboBoat, we utilize a reed switch to detect a magnetic latch accessible by the divers external to the payload enclosure.

RoboBoat Safety harness with remote and onboard trigger systems

Safety harness with reed switch for Graey

RoboBoat Safety harness in context with fuse board and regulators

Safety harness with Onyx splitting the input into two outputs
Custom Fuse PCB
The payloads receive power from a 12VDC regulator and is distributed through a custom fuse board. The new addition of this fuse board ensure electrical integrity of the system in case a short of an individual component.

